Uncertainty.
Not exactly a word people get excited about.
It sounds hesitant. Awkward. Slightly unglamorous. People usually prefer words like accuracy, confidence, and performance. Those words sound strong. They look great in headlines and presentations. Uncertainty sounds like the word that arrived late, carrying too many questions.
But honestly, uncertainty might be one of the most important ideas in science.
Why? Because people are often too impressed by answers that look certain.
If a method performs really well in the exact setting where it was designed, trained, and tested, everyone celebrates. And fair enough — strong performance matters. But the real world has a bad habit of refusing to stay the same. Environments shift. Conditions change. Data collected in one place may not look quite like data collected somewhere else. A system that seems brilliant in one setting can suddenly become much less reliable in another.
That is where uncertainty becomes interesting.
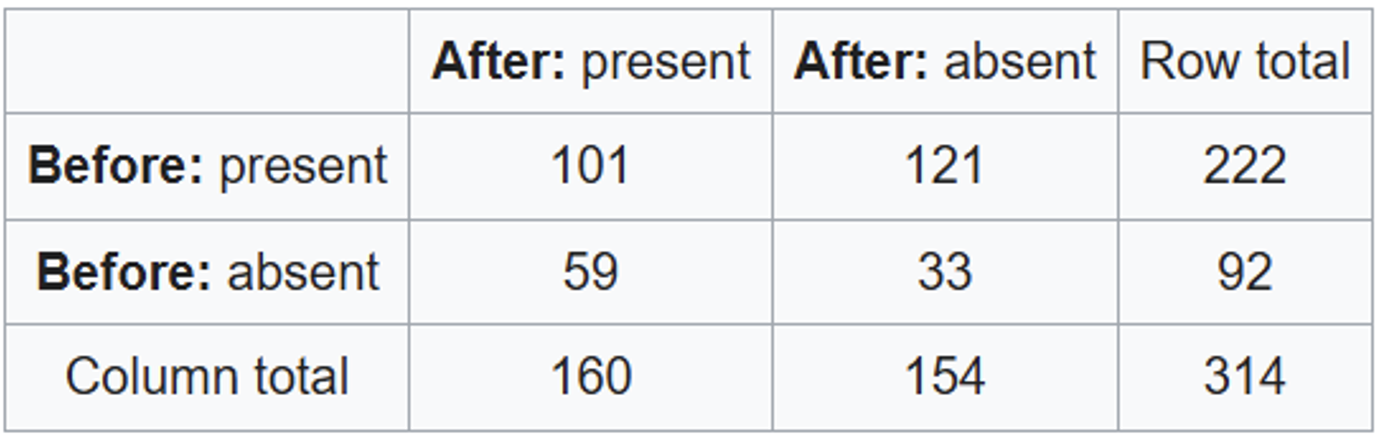
A good example comes from medical AI. Imagine a model that looks at retinal OCT scans — cross-sectional images of the eye — and tries to decide whether they look normal or show disease. At first, this sounds simple: train the model, test the model, report the score, done. But in real clinical use, things are messier. Different hospitals use different scanners. Images are collected in slightly different ways. Patient populations vary. So the model is no longer seeing exactly the same world it saw during development.
Now here comes one useful academic term: Evidential Neural Network, or ENN.
That sounds very official, but the basic idea is actually simple. A regular model usually gives you an answer. An ENN tries to do two things at once: give you an answer, and also give you a sense of how much evidence it has for that answer. In other words, it is not just saying, “Here is my prediction.” It is also saying, “Here is how strongly I believe my own prediction.”
That difference matters a lot.
Because in a clinical setting, a wrong answer is bad. But a wrong answer delivered with complete confidence can be worse. If a diseased scan is confidently labeled as normal, that can create false reassurance and delay care. In settings like that, uncertainty is not a flaw. It is a warning light. It is the model saying, “Be careful with this one.”
That is why uncertainty should not be treated as weakness.
It is not the opposite of intelligence. It is the part of intelligence that admits limits. It is what keeps a system from acting like it knows everything when it does not. And honestly, humans could probably use more of that too.
So maybe uncertainty is not the enemy of knowledge.
Maybe it is the part of knowledge that tells the truth.
Now for the fun part, use uncertainty in a sentence by the end of the day:
Serious:
In clinical AI, uncertainty matters because it can signal when a prediction should be reviewed more carefully instead of being trusted automatically.
Less serious:
Uncertainty is the invisible editor that keeps rewriting my week without permission.
See you in the blogosphere!
Abigail Xi Chen